개념정리 테이블
| Metric navigation | 맵의 모든 장애물의 좌표를 정확한 좌표로써 나타내고 메모리에 저장하는 방식. |
| Topological navigation | 노드와 링크로 맵을 구성. 노드와 링크간의 거리정보, 맵정보를 다 저장한다. 맵의 메모리는 metric 방식에 비해 상당히 줄어든다. |
| Hybrid navigation | metric, topological방식의 각각의 장점을 모아서 맵을 표현한 방식이다. node-link로 맵을 표현하다가 필요할 때마다 Metric navigation 방식을 가져와서 사용하는 식. |
| closed-world assumption | 맵의 장애물들을 최대한 간단히 나타내서 맵을 구성하는 메모리를 줄이는 방식. 맵을 선으로 표현한다. |
맵을 grid기반 맵으로 나타냈을 때, cell의 갯수가 적어야 메모리를 적게 차지한다.
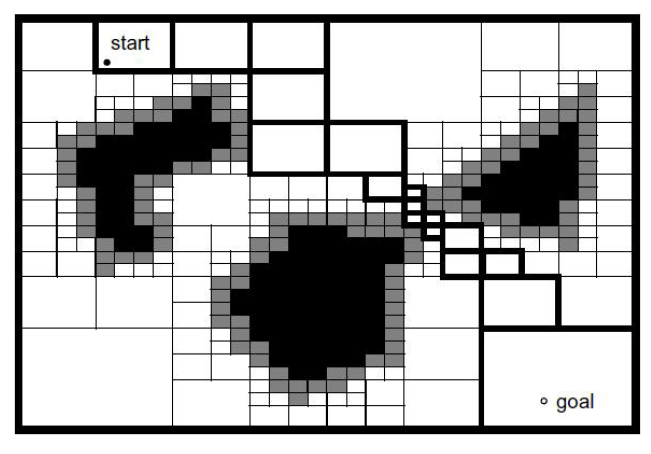
따라서 위 그림과 같이 맵을 표현하는 방식도 고안되었다. memory는 확실히 적게차지하지만 맵을 구성하는 방법이 어렵고 까다롭다. 요즘에는 memory가 워낙 넘쳐서 이런 방식은 사용하지 않는다.
Occupancy grid란?

- 가장 많이 활용되는 grid맵 방식.
- fixed cell decomposition 방식이다.(위 처럼 grid크기가 제각각인거 말고)
- 레이저나 라이다센서같은 걸로 장애물의 위치를 판별한다. 라이다센서에 감지되면 장애물이 있는거고 그 전까지는 장애물이 없는거니까 free space로 간주하여 맵을 생성한다.
- 다루기 쉽다.
Topological representation?

노드와 간선들로 구성하고 각각의 정보를 노드와 간선안에 다 저장.
내비게이션 하면서 artificial landmark, natural landmark 가 필요할 수 있다. <== 외계센서를 이용.
=> 그 이유는 내계센서만으로는 로봇의 위치가 불분명하기 때문이다.
artificial landmark란 QR코드 같은 것을 사람이 인위적으로 맵에 설치하여 로봇이 알아볼 수 있게 하는 표식이다.
로봇의 현재 위치에 대한 신뢰도를 수학적으로 계산하여 지니고 있어야한다.

single hypothesis는 로봇의 위치를 하나로 추정하는 것이다. 이 근방에만 있을거라고 추정하는 방식이고 multiple hypothesis는 로봇의 위치를 이쪽일 수도 있고 저쪽일 수도 있다고 생각하는 방식이다.
아래 그림들로 이해하자
single 방식들 :



아래는 multiple hypothesis 방식으로 로봇이 자기 위치를 추정하는 방식이다.

오른쪽으로 갈 수록 불확실성이 감소하여 결국에는 로봇이 자기 위치를 확정할 수 있다는 것을 볼 수 있다.
검은색 그림자같은것은 로봇이 자기 위치를 추정하는것을 의미한다.
만약 single 방식이었다면 localization 하는중 자기가 예상하던 위치와 틀어져 버리면 오류가 나버리지만 위와 같은 multiple 방식으로 추정하면 자기 위치를 잃어버리지 않는다.
'공부공간 > Robot Navigation' 카테고리의 다른 글
| [로봇내비게이션 강의정리] Voronoi (0) | 2020.04.06 |
|---|---|
| [로봇내비게이션 강의정리] V-graph(Visibility) (0) | 2020.03.31 |
| [로봇내비게이션 강의정리] Shortest path Algorithm (0) | 2020.03.25 |


